Chapter Ten
NAVAL RADARS
10.1. AA/LUCY (THE SUBMARINE RADAR)
10.2. AWS-1 AIR WARNING SHIP-BORNE NUMBER ONE
10.3. AWS-2
10.4. RT 994/992
10.5. AWS-4
10.6. AWS-5
10.7. AWS-6 DOLPHIN
10.8. AWS-6 DANFISH
10.9. T996/AWS-9 3D
10.10. AWS-9 2D
10.11. MESAR (MULTIFUNCTION ELECTRONICALLY SCANNED ADAPTIVE RADAR
10.12. ARTISAN
10.13. SAMPSON
10.14. THE RADAR RT909
10.1. AA/LUCY (THE SUBMARINE RADAR)
This was a radar that occupied the most capable Radar Engineers of their time, working with state-of-the-art techniques and materials, yet no record can be found of their end product.
Currently six Engineers have their memories and notebooks of working on the product. The highest serving Sub-Mariner Officer of the time has been spoken to, National Archives and national specialist publications have been tested for records, but none seem to exist.
What is known is that a ‘pop-up’ Radar, operating at X-band, was being designed and produced by the Decca Radar Company in 1952/3. The research and development was carried out under the project code name ‘AA’ and a production run of some 14 equipments was implemented under the project name ‘LUCY’.
The Admiralty Surface Weapons Establishment (ASWE) co-ordinated the project and would oversee the manufacture of the Antenna/Mast assembly and would ‘free issue’ or contract loan displays of the JT-1 or 77A Type (Decca would not have responsibility for either sub-element).
It was recognised at the time that ‘close-in’ ocean waves would be a very real problem for the radar due to the resultant ‘clutter’ being shown on the operational display.
In conclusion it is assumed that the role of the UK’s Submarine Fleet changed and that other technologies may have been employed. We do not know if the introduction of nuclear powered craft caused a re-think in respect of submarines being required to observe adjacent coastlines.
10.2. AWS-1 (Air Warning Ship-borne Number One)
The AWS-1 was Decca Radar’s first S-band sea-going radar. The product was developed in 1956/7, initially to address a Royal Danish Navy requirement for Air and Surface Warning with Target Indication.
AWS-1 was produced by a design team led by R.L. Burr, heading up to Maurice Easy in the ‘Radar Development’ group of the company.
The antenna and turning-gear/pedestal were products of the ‘Radar Dev.’ Department, Mechanical Design Section at Davis Road No.1. The calculations for the antenna profile were a product of the Microwave Department, also part of Radar Dev. The cosec2 double curvature antenna structure went on to be manufactured in its hundreds when incorporated in the products AWS-1, AWS-2, and AR-1 radars. The antenna structure was later only slightly modified for the AR-15 and 15/2B but became a spot welded structure for Watchman with the very similar profile. The AR15/2 introduced the second (high) beam concept, aimed at reducing short-range ground clutter and a reduced ‘cone of silence’.

SYSTEM PERFORMANCE DATA
- Single Tx/Rx – Operated in S-Band with a magnetron within the range 2700-3100MHz
- 650KW Peak Power. Pulse width 1microsecond
- PRF 700 pps. Klystron Local Oscillator
- Receiver - Log/Lin. Automatic Frequency Control
- Antenna - Cosec2. Double Curvature – 16foot span.
- Turning Gear - 15 rpm
- Target Detection – Up to 40,000 feet
- Maximum Range 75nm.
The AWS-1 was primarily designed for installation on vessels of the Destroyer, Frigate and Corvette Classes, providing high altitude cover, surface warning and air and surface target indication.
AWS-1 was also deployed in land based ‘coast watch’ situations, an example being the installation at Mynnydd Rhiw, procured by RAE Aberporth, to monitor sea and air traffic in Cardigan Bay off the Welsh coast. (The installation being used as a model to demonstrate the AR-1 Radar concept). The AWS-1 antenna had a width of some 16feet and, as a cosec2 elevation pattern was desired, the reflector profile would have to have a ‘double curvature’ surface (this has been defined in previous sections). As with all reflector antennas, their performance depends upon the accuracy of the surface profile, which had to be within the limits specified in order to achieve the performance required. Until this time all the reflectors had been parabolic; either parabolic cylinders or parabolic revolutions or sections of parabolic revolutions. The preferred method of manufacture of such surfaces was ‘metal spinning’ which would produce very accurate reflectors, or, if a parabolic cylinder were required, then the reflecting surface would be dressed over a set of accurately machined ribs. In either case no serious manufacturing problems were ever encountered and the accuracy was maintained. However, the requirement to produce a surface whose curvature changes progressively over the surface, presented quite a challenge to the Decca Radar mechanical engineers, as the metal spinning could not be used and to attempt to dress sheet metal over a double curvature set of ribs would result in the skin ‘kinking’, where the metal is trying to bend in two different directions at one point. The solution came in a design of unique patterning of punched aluminum mesh, this having ‘clover leaf’ shaped holes closely spaced to each other giving the skin pliability enough to bend in two directions at a point with sufficient accuracy to satisfy the requirements of the antenna designer.
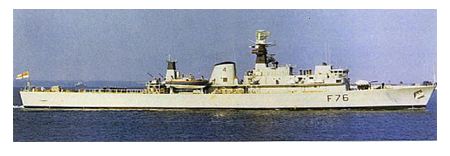
The picture is of HMS Mermaid fitted with AWS-1 radar. She was originally ordered by President Kwame Nkrumah of Ghana and would have been named ‘Black Star’. However, he was gone before the ship was launched. It was then transferred from the British Foreign and Commonwealth Office to the Royal Navy and renamed HMS Mermaid. The AWS-1 was not standard fit for the RN but during sea trials they discovered that its target detection performance was far superior to their standard radar. The ship was retained in operational service (an important catalyst for the company to gain substantial business with the RN). Several years later the Mermaid was sold to the Malaysian Navy.
10.3. AWS-2
The AWS-2 system performance enhancements came from improved filtering and signal processing techniques:
CIRCULAR POLARISATION (CP) - was introduced which made use of the principle that reflected energy from a circular polarised beam hitting a spherical object (raindrop) could not find its way back to the radars receivers – thus reducing the effect of precipitation. (CP was variable from linear at 45degrees through elliptical to circular).
STABLE PLATFORM – the stable antenna platform accepted roll and pitch information from synchronous transmitters driven from the ship’s vertical reference giving obvious radar advantages.
The TRANSMITTER used Tunable Magnetrons – 2700 to 2900 GHZ or 2900 to 3100 GHZ prf – 700 pps +/- 2% at 1.0 sec. +/- 10%.
Automatic Frequency Control – circuits compared the magnetron frequency with that of the local oscillator and automatically adjusted the local oscillator frequency to maintain a constant IF (Intermediate Frequency).
Solid State – the move to ‘encapsulation’ to overcome, for example, insulating oil problems when handling EHT, was first introduced on the AWS-2.
RECEIVER – Parametric Amplifier – Noise Factor would be no worse than 3.5dB for 24dB gain over 15MHZ bandwidth. LOG/LIN. CLR. Log PLD Gated by quantised dicke-fix (Q.D/F) processing.
Thermionic valves had given way to transistors throughout the receiver/processing circuits bringing weight and size gains, but more importantly extending the radar availability ‘air time’ and improving its maintainability.

10.4. RT 994/992
Both 994 and 992 were ‘below decks’ update packages fitted to many UK/RN ships and were also sold worldwide. The 994 comprised the enhanced AWS-4 transmitter and the 992, basically, a digital moving target indicator sub-system.
The 994 centred on the ‘LOTUS’ Tx/Rx, originally designed as part of the AWS-1. Its update went on to power the ‘world beating’ AR-1 whose further update became AR-15, following which the Tx/Rx went back to sea as AWS-4 / 994.
During refit programmes a number of Leander Class Frigates had their ‘below decks’ equipment replaced, as did HMS FEARLESS and HMS INTREPID also the Castle Class patrol vessels HMS LEEDS CASTLE and HMS DUMBARTON CASTLE. The later types, at the time, being equipped with non-stabilised antenna platforms manufactured by Plessey Radar. The last of the 994’s was fitted to the RFA ARGUS and this particular installation had the antenna mounted on a gimbaled- stabiliser of the type developed for the AWS-5.
The equipment supplied as 994 had been fully proven with the AWS-4 product. The 994 was the ‘Main Search’ Radar for Air Warning and Target Indication. It had full anti-jamming protection provided by ECCM Rx’s and DMTI processing, giving a 30% improvement in detection range of air targets compared with the equipment it replaced.
Developments had introduced tunable magnetrons, low noise parametric amplifiers and took further steps towards ‘solid state’ where encapsulation replaced oil filled devices.

10.5. AWS-4
There had been nearly two decades of Radars that grew out of what could be described as ‘rooted in World War 2 technology’. Customer’s loyalty lay in their confidence in our ability to keep abreast of core component advancements, but customers also significantly broadened the scope of their requirements. Enhanced detection from low maintenance designs, taking up reduced space in smaller, faster vessels and operating in a broad temperature range. This set the radar as the sensor at the centre of state-of-the-art weapon systems and therefore its performance had to be equal to that of the total system.
Mechanical and Material Engineering played a significant part in the success of the AWS-4. The original AWS-1 antenna would, for example through ‘windage’ and ‘RF leakage’ no-longer meet the requirement. Also Metal Spray/GRP constructions would not comply and the early use of polyester resins was unsuccessful. The answer was found in GRP but using the very latest Epoxy Resins cured at very high temperatures, this ensuring stability during radar operation. The reflecting surface was an electroformed membrane of less than two thousandths of an inch thick, with a minimum of perforations sufficient only to maintain the critical cosec2 double curvature profile of the accurately made mould (which in its manufacture used NC sheet metal profiling techniques.)
A new stabilised turning gear was developed to match the performance of the new antenna. Developments in dielectric material also enabled the primary radar feed-horn (to the antenna reflector) to also carry (at D-Band) an IFF feed, so that in the ships superstructure design (‘windage’ and weight considerations were vital) there was a considerable advantage in reducing the need for two masts and two reflectors down to just one.
AWS-4 OPERATIONAL PERFORMANCE was:
Especially suitable for fast attack craft and patrol vessels providing surface and air tactical surveillance and target designation to weapons systems (surface craft detected at the horizon, others 60 nm up to 38,000 feet with 80% detection probability).

Low Noise Parametric Amplifier – Rx’s - Log/Lin with choices of ECCM including dicke-fix and PLD providing effective anti-jamming performance. DMTI – Locally coherent, self-compensating for clutter velocity range 0-60nm, protecting against sea, land and rain clutter. Video processor – digital correlation and CFAR processing with two-phase double canceller.
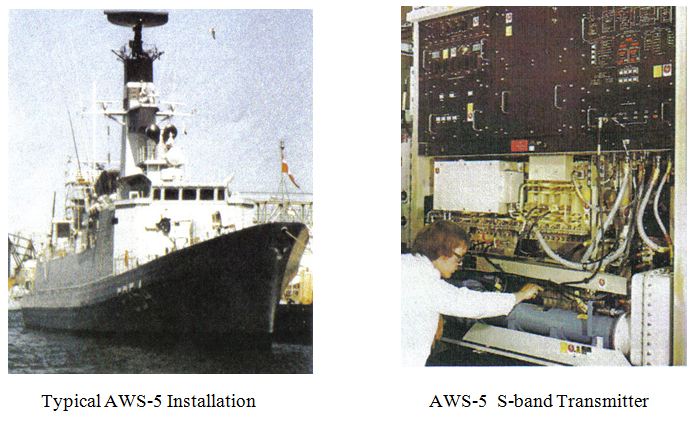
10.6. AWS – 5
The AWS-5, although subsequently sold to various overseas customers had its design requirements established in close liaison with the Royal Danish Navy – a specification in every parameter as stringent as that received from any customer.
The concept of the AWS-5 was a pulse compressed frequency agile radar operating in E/F (S) band with DMTI (embracing ships velocity correction) and a stabilised (roll and pitch) two beam antenna. With such requirements the radar became very expensive and thus limited in its sales.
Fast Patrol Boats carrying state-of-the-art weapon systems had the capacity to sink Frigates and Destroyers and the AWS-5 addressed the sensor requirements at the heart of such a system. Supersonic aircraft, surface skimmers and high diving missiles were required to be seen in good time for the ship’s systems to destroy the threat.
Real advances in radar design made by the AWS-5 can best be described by the re-production of the coverage diagram, antenna profile and its transmitter.

MASTHEAD EQUIPMENT
Design considerations for any radar are always one of compromise and it will not have gone un-noticed that the consolidation of two antenna reflectors into one, made for the AWS-4, was not carried into the AWS-5 in that form. While the main reflector of the AWS-5 did carry IFF, by means of a dipole array around the E/F Band horn, a second structure was mounted on the back of the main reflector to produce the primary radar high beam cover. The separate high beam antenna included a ‘stripline’ feed to an array of dipoles in a troughed structure. There was a single waveguide feed up the mast to the antenna sub-system, and the beams were selected by means of a passive frequency selective waveguide unit on the back of the antenna.
TRANSMITTER
For ‘pulse compression on receive,’ the transmitter was required to transmit a swept frequency pulse and be agile across the E/F (S) frequency band, also to be flexible in the numbers of pulses transmitted per pri. The RF power amplifier was a travelling wave tube (TWT). The selected TWT required some 45KV/DC to operate and although related systems (e.g. AR3D) were using oil filled tanks to insulate HV components, this, for weight and other reasons, was not an option for the AWS-5, so SF6 gas was chosen as the insulating medium. A solid state RF amplifier was employed to feed the TWT, which accepted +10dBm peak input and amplified it to 2W, feeding the TWT. Thus the transmitter was a very large RF amplifier providing some 72dB gain.
CONTROL
Monitoring and BITE (Built in Test Equipment) were achieved by means of a microprocessor.
SIGNAL PROCESSING
The swept frequency pulse was obtained from a SAW (Surface Acoustic Wave) 30MHz device, which was up converted and amplified by a double superhet to 480MHz, then to E/F (S) Band with output to the transmitter at +10dBmW. Frequency agility was provided over the full E/F (S)- band using a total of 32 channels, by switching the upper frequencies local oscillator. The 32 frequency channels were allocated as 20 for the main beam, 8 for the high beam, and 4 unused, providing the guard band between the two beams.
MTI - was applied to the received signals from both the high and main beam with their joint alignment ensured by means of a delay in the high beam signals, processed within the MTI Rack.
OPERATION PROVISIONS
Excellent anti-jamming and clutter rejection through high/low beam operation to counter
stand-off jamming.
CP or linear polarization facilitated rejection of rain returns.
Pulse-to-pulse, programmable, or random, frequency agility, for ECCM protection and de-correlation of clutter was employed.
Frequency coded transmissions against deception jamming was a feature.
High ratio pulse compression gave finer resolution.
Adaptive coherent DMTI removed sea and land clutter responses.
Coverage: Clutter-free height, in excess of 100,000 feet back to an angle of 60 degrees and out to a range of 80 nm was achieved.
DATA SUMMARY
Antenna – Azimuth beam width 1.5° nominal. Main beam (cosec2) 40degrees nominal. High-beam 30° vertical aperture.
Frequency range – 2.7 to 3.1 GHz
Tx – TWT driven amplifier characteristics, with impulse frequency modulation
Agility (a) fixed frequency transmission (b) pulse-to-pulse agile (c) scan-to-scan agile
Source – multiple frequency crystal - controlled synthesizer.
VIDEO PROCESSOR - Digital with background averaging characteristics – CFAR, cross/beam integration
MTI – Digital I and Q phase double canceller
Characteristics – Double loop adaptive control
Velocity compensation
Variable range gate
PLOT EXTRACTOR – High resolution, continuous extraction characteristics in real-time with buffer store, skew-cell correlator azimuth correction.
RECEIVERS - Coherent double super-heterodyne, multiplexed high and low beam signals.
Pulse compression using surface- wave equaliser giving digitised log output.

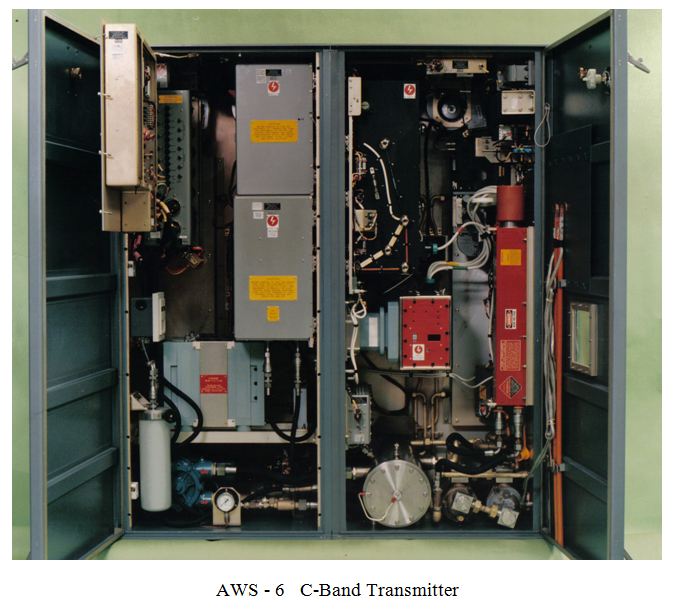
10.7. AWS – 6 (DOLPHIN)
From a ‘detailed product definition phase’, in 1978 an extended series of system hardware and software trials were conducted at the radar company’s site at Cowes, through to 1982. The resulting product was a search radar optimised for an anti-missile task, designated AWS-6.
While the AWS-6 had a genuine multi-role capability, its primary function addressed the countering of the ever-increasing threat from smaller and faster missiles to the worlds Navies. ‘Seaguard’, a ‘Close In’ Weapon System (CIWS) was developed by CONTRAVES using a multi-barrel Oerlikon Sea Zenith gun with a high rate of fire and hemispherical coverage. This would typically be installed on a light Frigate commissioned for escort or patrol duties. Point defence was provided by the combination of the AWS-6 radar and the CIWS tracking gun. Sea level or high elevation, closing or crossing, targets would be engaged within the hemispherical coverage.
Size, weight and system performance led to the adoption of a C-band operation for the AWS-6.
The essential integration of IFF to CIWS systems, coupled to antenna size/windage considerations brought about the configuration depicted in the photograph, where the IFF antenna sits on the base face (or chin) of the primary radar antenna. Also shown is the masthead antenna stabilisation assembly. Within a dual beam system each beam employed a squintless linear array with ‘stripline’ feed. Sidelobe performance was greatly improved over conventional horn structures, resulting in an improved overall system performance against clutter and jamming.

DATA SUMMARY
Antenna/Turning Gear – Integral IFF, selectable rotation rate between 10 and 60 rpm. Stabilised +/- 25degree roll and +/- 10 degrees pitch.
Transmitter – Pulse driven TWT, peak power 500Kw
Frequency range G(C) Band
Signal Processing – 3 and 4-Pulse MTI Canceller
CFAR Processing
16 cell digital background averager
Track Extraction – Auto/Manual initiation of air and sea targets.
Track capacity in excess of 200 targets
Defence Mode Performance – Instrumented range 60Km
Data refresh rate - 2secs. 30revs./min
Detection range – typically 30nm (55Km)
Automatic Target Extraction – to AIO (Action Information Organisation)
Providing ‘track while in scan’ capability
Surveillance Mode Performance – Instrumented range 180Km
Data refresh rate – 4sec.
Detection Range – 62nm (110Km)
10.8. AWS-6 (DANFISH)
The Danish Navy commissioned a variant of the AWS-6, for fitting on board their Fishery Protection Vessels, under a project named DANFISH. This radar operated in C-band but had an extended range, which was provided by the means of a larger reflector on the antenna, (increasing the vertical access by a metre). Due to the increased windage of this antenna and the potential problems from ‘icing’, the whole antenna and its stabiliser were housed inside a radome at the ships masthead. The notion of an inflatable radome was considered as a way of dealing with a strict ‘above decks weight’ specification. However, even after a successful trial programme it was determined that the risk of an inadvertent deflation – which would cause serious damage to the antenna - was too high, so the structure reverted to a solid design.


10.9. T 996/AWS-9 (3D)
In the early 1980’s the Royal Navy were requiring new long-range surveillance radars for fitting on the generation of defence ships under design and construction. An enhanced height finding capability was of particular importance to them and they required from potential supply contractors various levels of performance at increasing levels of cost. This made the conceptual design difficult with so many options having to be considered simultaneously. A mid-term management review of the proposal revealed a confused state of design unlikely to produce a contract-winning product.
A decision was made to stop the current effort and bid three completely different radars. The first was a full three-dimensional radar similar to those in-service with the United States Navy but slightly smaller to fit British ships. The third radar was modern two-dimensional radar with a limited height finding capability and the second was a radar in between these two in terms of both cost and complexity, but it would have a good height finding capability (2.5D).
This change in direction caused considerable upheaval in the proposal effort and coming early in December cancelled Christmas for most of the team. The proposal produced was of the highest quality and was acknowledged as such by the MOD/RN, giving them a clear picture of cost against performance and the resultant trade-offs. The conclusion was that Plessey Radar was awarded the 996 design and supply contract.
996/ AWS-9, a ‘3D’ Naval Surveillance and Target Radar, designed to meet a UK (MOD) ‘Cardinal Point’ specification.It entered service as RN Type T996 and subsequently was launched onto the commercial market as AWS-9 (3D)

The System employed a Multibeam Stripline Feed, Phased Array Antenna, which provided continuous three-dimensional data on all Air and Surface targets within its long-range capability. The system was designed to integrate with the operational needs of defence missile systems such as ‘Seawolf’, and ‘Sea Dart’.

The first of 36 Shore Based and Ship Borne systems was delivered to MOD (N) in 1986 and the distinctive Antenna went on to grace the pinnacle of HM Ships super-structures for more than two decades - including the Invincible Class of Carriers, Type 23 Frigates, Type 42 Destroyers and other vessels of the U.K. Fleet.
Commercial sales included NATO Countries and those further afield.
996/AWS9 SYSTEM CHARACTERISTICS
- ANTENNA – Multibeam stripline fed, phased array
- FREQUENCY RANGE – E/F (S) Band
- STABILISED ANTENNA - Two Axis roll and pitch
- TRANSMITTER - Driven TWT with RF Amplifier
- RECEIVER - Double Superhetrodyne/pulse compression
- MTI - 3 and 4 Pulse Canceller
- PLOT EXTRACTOR - Software based
- TRACK EXTRACTOR - Software based
- CONFIRMED TRACKS - More than one hundred
- TRACK INITIATION - Automatic or Manual to Ships information Systems
- ECCM - Permits continued operation through heavy ECM zones
- NORMAL MODE - Detection of Fighter Attack at 115 Kilometres
- MISSILE MODE - Sea-Skimmers detected at the radar horizon
The advent of pulse compression and its need for a lower EHT (with no degradation of radar performance), was a distinct advantage to the transmitter designers and production engineers, while also being a plus for the products operational reliability, sustainability and maintenance.

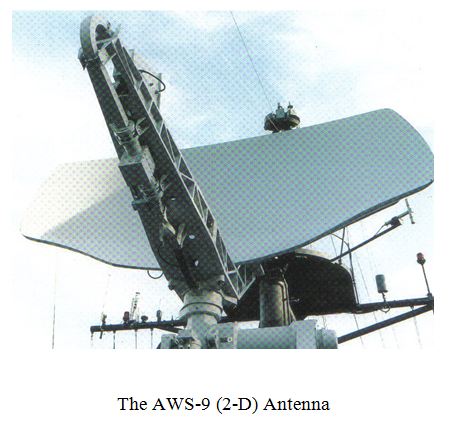
10.10. AWS-9 (2-D)
A two-dimensional surveillance and target indication Naval Radar designed to meet the needs of the modern Frigate, Corvette and off shore patrol vessels.
The product AWS-9 (2-D) was developed when customers desiring AWS-9 (3-D) performance found that the ‘lifetime costing’ of that product did not match with their defence budget constraints.
Operating in E/F (S)-band 2-D brought much of the AWS-9 technology to smaller ships, establishing itself as an important part of a highly reliable family of sea-going products.
As a 2-D system it provided long-range air target detection and excellent performance against low flying aircraft and sea skimming missiles.
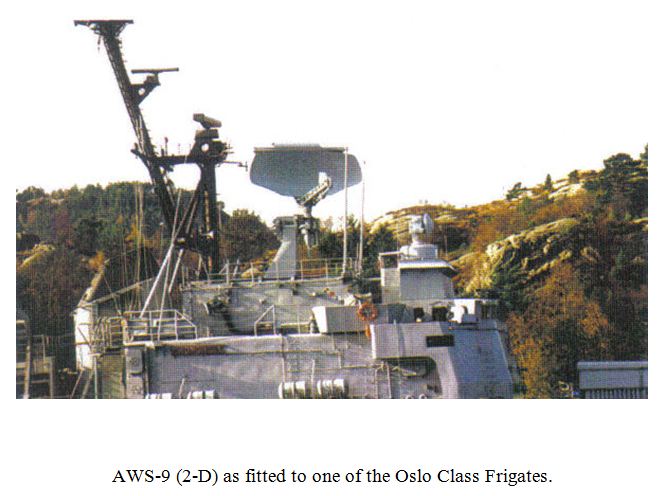
The AWS-9(2-D) was initially developed for use by the Norwegian Navy, this under the NAAWS contract (Norwegian Anti-Air Warning System). Seen as a simplified 2 dimensional version of the AWS-9 it had an antenna/reflector of new GRP design and a new stabilised platform. It was powered by a sea-going version of the Watchman Transmitter with its signal processing similar to that of the AWS-9.
The overall system design was a compromise between high quality performance, clutter rejection and masthead weight.
The antenna, fully stabilised between +/- 25degree roll and 12.5degree pitch, ensured accurate detection in the most severe sea states. The absence of active electronics at the masthead reduced the need of such maintenance.
To facilitate long-range cover and a high up-date rate for missile systems, two operational needs were provided, ‘Defence’ for combat situations and ‘Surveillance’ for normal operation.
TRACKING, of the highest order was achieved by the AWS-9 (2-D) through an advanced plot and track extractor using dual hypothesis maneuver logic, fully implemented in ADA software, ensuring that all air and surface targets would be automatically initiated and tracked. Accurate track data at all times being consistently passed to the command and weapon systems.
Electronic Counter Measures (ECM) were handled by an extensive set of anti-jamming features including high power frequency coded transmissions operating across a wide bandwith, pulse compression and advanced signal processing techniques.
CLUTTER REJECTION was maximized by the employment of a very small cell size, together with coherent Doppler processing with 4-pulse MTI cancellation followed by CFAR processing and MARCOS (Pica, American designer of logic circuits) multi-level integration. The system ensured reliable detection of targets and low false alarm rates in the presence of rain, sea and land clutter.
DATA SUMMARY:-
- Masthead Equipment Operating in –30C to +55C degrees
- Below Decks Equipment – Water Cooled
- Primary Antenna – High Gain/Horn Fed
- Secondary IFF Antenna – Optional
- Antenna Rotation Rate – 12/24rpm
- Transmitter – Driven TWT
- Receiver – Double Super Heterodyne with Pulse Compression
- MTI – 3 and 4 Pulse cancellation
- Video Processing – Digital Background Averaging and Integration with Adaptive Clutter Map
- Track Extraction –was Software-based and provided Confirmed Tracks greater than 200, where ‘Track Initiation’ could be Automatic and or Manual.
10.11. MESAR (Multifunction Electronically Scanned Adaptive Radar)
MESAR was never a radar as such, but always a major demonstrator of a revolutionary principle.
THE ACTIVE ARRAY REVOLUTION
Conventional radar has always suffered from some basic problems, which years of development have just ‘lived with’ because, until the revolution described in this section, they were fundamental properties of the system architecture and technologies on which it relied.
One of them sounds a bit obvious in that, because conventional radars have antennas that rotate at more or less a fixed rate, the radar can only visit each point in space once per revolution. So, for a supersonic incoming sea skimmer doing, say, Mach 2 (600 m/s) and surveillance radar running at 30 rpm (2 second data rate), the target, which might only appear over the horizon at 25 Kms or so, will travel over a kilometre between radar ‘looks’. If the track extractor uses a 2 out of 3 rule for track declaration, there could be the best part of four kilometers between the first detection and track declaration.
The timeline for modern missile systems requires time to prepare weapons for launch and reach their optimum speed for maneuver – the long and the short of it is that a sea skimming missile is a very real threat to a surface ship. Worse still, a loosely co-ordinated attack of two or three sea skimmers on different radial bearings will rapidly use up system time, placing the platform at risk.
A further problem is a basic property of the architecture of a naval weapon system. Most combat ships have only enough deck space for two dedicated tracking radars, neither of which is likely to enjoy full hemispherical coverage due to obscuration by the ships’ superstructure. So there is one tracker dedicated to an incoming threat from forward and another aft (or port and starboard, depending on the configuration). The result is that a co-ordinated attack of three missiles on three different bearings will saturate the hard kill defence system and lead to a hit.
A third issue is simply raw power. Radar detection is all about the level of mean power, which hits a target and returns to the receivers. System losses have always been a problem because ‘lumped’ transmitters have conventionally fed power through a waveguide transmission line from below decks to the antenna at the top of the mast (or from the transmitter cabin to the antenna trailer for a ground installation). Put your hand on the waveguide and you will find it warm: that’s wasted power. This problem is exacerbated by so called active antennas, which used high power microwave components to switch or scan the transmitted beams. It’s not unusual for well over half the power to be wasted in warming the ship and its topsides, which is a direct but historically accepted feature of conventional radar design.
The fourth and final issue for this text is the ‘fixed’ nature of radar: pulse patterns, pulse coding, waveform generation and so on tended to be ‘fixed’ by the technologies of the day. Pulse compression was limited in the early days, for example, by discrete component filters which yielded to surface acoustic wave devices which, although more elegant, still limited compression ratios and pulse characteristics.
It’s a tribute to the ‘pre-active array’ days of radar that so much was done with a relatively inflexible architecture.
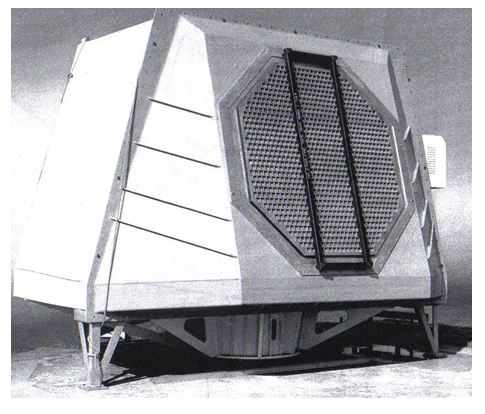
However, it has always been known that at least some of these problems were solvable. Early editions of some of the standard radar texts refer to possible designs where the transmitter was, in some way, broken up into smaller mini transmitters and distributed across the face of a planar array. Putting the receivers with them (and the associated duplexers etc) and a phase shifter and you would have the ability to form a transmit beam in any direction within the conical volume allowed by grating lobe boundaries. In one fell swoop, all of the losses traditionally associated with long waveguide runs and high power microwave components are virtually removed, allowing all of the power created by all the tiny transmitters to be radiated. In terms of a practical system, implementation starts with the structure of the antenna: to create a beam of roughly equal elevation and azimuth beamwidth needs a square-ish aperture; to get an antenna pattern with an acceptable sidelobe structure and tracking quality beamwidths at S-band you will end up with an aperture of a couple of meters in both planes. Or, in terms of the number of radiating elements and sticking to a ~λ/4 spacing, you end up with about two and a half thousand radiating elements in an array face.
There is a design choice, which is a product of the technologies available. An array could have, at one extreme, a lumped transmitter and a phase shifter either at sub-array level or at element level. This would give near-instantaneous scanning of the beam in both planes within an allowable volume, but does not get over the RF loss problem.
One could elect to have a bulk transmitter at sub-array level, overcoming part of the loss problem but creating an implementation challenge in terms of fitting in the transmitting elements and their power supplies and cooling apparatus ‘somewhere’ on the antenna.
An ideal would be to implement a solid-state transmitter (with its associated phase shifter and receiver) at each element. This was the implementation scheme, which drove the MESAR 1, 2 and Sampson radar programmes. The pulse pattern to be transmitted is distributed through an equiphase network to each of the transmitting amplifiers at the array face. Received signals are passed through a low noise amplifier and recombined in ‘sub-arrays’ for reasons discussed later, and then through signal stage down conversion and digitisation.
A further implementation is, theoretically at least, possible and that is one where received signals are digitised at the array face or at sub-array level. However, distribution of the local oscillator at acceptable stabilities presents problems and Analogue to Digital (A to D) converters which run at S-band would be a bespoke component for the military radar market and therefore run counter to the trend for using commercial off the shelf (COTS) devices.
So, the core technology, which made the active array possible, was Gallium Arsenide (GaAs), a compound created from columns III and V of the Periodic Table, which you last saw, pinned to the wall next to the fume cupboard in your chemistry class. It turns out those conventional semi conductor materials such as Germanium and Silicon become very lossy at the frequencies of interest to the radar designer. Gallium Arsenide (and other III V compounds) does not. What made this all commercially viable was the advent of mobile phones. Without Mrs. Thatcher’s yuppie boom and Motorola’s ‘must have’ mobile phone, the amount of GaAs needed to service the radar industry would have been vanishingly small but mind numbingly expensive. Processing small GaAs wafers under prototype laboratory conditions to produce experimental devices is one thing: having a fully underwritten and understood production process capable of supporting in service equipment for over 25 years is something completely different.
Once you have GaAs and allied solid-state microwave technologies in the form of products and underwritten production process, you can fabricate Transmit / Receive modules – small enough to be mounted right behind a planar array face of radiating elements and efficient enough such that the waste heat can be extracted with air cooling techniques.
This architecture also solves one of the other problems of conventional radar, the fixed data rate caused by fixed rotation rates. Since each element of the radar antenna now has its own transmitter, receiver and phase shifter, it is possible to scan the beam, more or less instantaneously, from one point in space to any other allowable point. In practice, because the scanning loss causes the gain to fall off (by roughly the cube of the scanned angle off boresight), it makes sense to try to arrange – or schedule – the tasks to be done within a few degrees of boresight and not, unless you are really pushed, at the very edge of the scanned volume.
So, for a basic surveillance regime, we can have a pseudo random beam position pattern (making the scanning appear irregular as a first order ECM feature), which visits each position in space at an acceptable average data rate. It can arrange for critical areas, such as horizon search, to be performed more often to deal with last unmasking targets and longer range surveillance to be done less often, because it can likely tolerate the lower data rate. Initial detection to track confirmation times can be massively foreshortened, because it can be arranged for the beam to look back at a suspected plot in order to perform deletion or confirmation within a few milliseconds.
If we arrange for the receive beam-former to form a ‘sum and difference beam’, the radar can also perform monopulse tracking on selected targets; the systems pioneered at Cowes are able to perform such tracking and produce target accuracies which are more than capable of supporting modern weapon systems. Moreover, it is possible to interlace surveillance and tracking tasks such that they appear to be going on more or less simultaneously.
Back to the antenna configuration itself and the long running argument over fixed or rotating arrays. Our initial designs, for laboratory and field experimentation, were single fixed arrays and such arrays still have considerable utility where, for example, the threat direction is known. So, a ground based radar used to support long range ballistic missile detection and interception, would be sited so as to ‘stare’ in the known direction of the threat, the electronic scanning of the beam over, say, plus or minus 45 degrees being more than enough to perform initial detection as a ballistic missile appears over the horizon.
However, this would not be the case in the naval configuration and the problem is typically that of four fixed arrays, generally arranged at the masthead for higher frequency (smaller) systems or as part of the superstructure for lower frequency implementations, versus one or more rotating arrays.
Four fixed arrays weigh, to a first order, twice that of two rotating arrays – they therefore have to be mounted lower on the ship for the same overturning moment and therefore the radar horizon comes in and detection of high velocity sea skimmers is compromised. Four fixed arrays are likely to cost roughly twice that of two arrays.
A fixed array ought to be ‘oversized’ in order to compensate for the scanning loss at the edge of the scanned volume, otherwise detection will fall off and assuming the arrays are mounted to face the cardinal points, the weapon system performance will be sub-optimal at the four intercardinal angles. This over sizing further increases costs.
Perhaps the worst feature of a fixed array configuration to perform volumetric surveillance is the risk of failure or damage which could ‘take out’ one face and therefore leave the platform vulnerable for 90 degrees.
A rotating face does not suffer from any of the above problems, save the risk of failure or damage which, in this particular case, would, of course, leave the ship ‘blind’ at all angles.
Two faces, mounted back-to-back, but rotating offer an ideal compromise. Costs are constrained, weight becomes tolerable and returns the antenna to the masthead and the arrays do not have to be over sized because the task scheduler can conspire to ensure that ‘gain critical’ tasks are performed on or near bore sight. Moreover, if common single points of failure can be removed, a failure in one face merely leads to a halving of the data rate since, if in all respects, the antennas form part of two independent radar sets, performance in every other respect stays the same.
Thus the architecture of Sampson – less than half the cost of four fixed faces without the risk of failure and with full performance at all azimuths. The only slight price paid is the need to schedule signal-to-noise critical tasks on or near bore sight, rather than at extreme scan angles.
Rewind to the late nineteen seventies and early eighties. ASWE (now DRA Portsdown) began initial work into the practical implementation of an active array multifunction demonstrator. Plessey Research at Caswell were working on microwave GaAs devices, Plessey Roke Manor were researching into adaptive beamforming and Plessey Radar at Cowes had begun work on planar phased arrays with provision for GaAs devices mounted in waveguide elements. All of these interests came together and a joint co-ordinated programme of work agreed and jointly funded, with the long term aim of proving that the benefits described in forgoing paragraphs were realisable, hence a Multifunction Electronically Scanned Adaptive Radar (MESAR) was born. There is more on this topic in the technology section of this book.
MESAR technology has already led to the production of two new radars and both have been selected by the British MOD (N) to be central to the Royal Navy’s Defence Systems throughout the second and third decades of the 21st century. MESAR led to the SAMPSON MSR fitted to HMS Daring, the first of the six PAAMS (Principle Anti Air Missile System) based AAW (Anti Air Warfare) Destroyers. Technology from Sampson and Commander was used to create ARTISAN, the radar to replace the Royal Navy’s long-standing Type 996 radar.
MESAR 1
The year 1982 saw the launch of a joint ARE/Siemens Plessey development programme to demonstrate the principles behind ACTIVE ARRAY RADARS. Prior to 1982 Plessey Radar engineers had been working with colleagues at the company’s ‘Caswell Research Centre’ on the application of gallium arsenide (GaAs) technology. The result was a single face of 918 elements, each element being in itself a mini radar transmitter receiver.
The MESAR 1 radar underwent a stressing trials programme at Cowes on the Isle of Wight and at West Freugh on the west coast of Scotland. This radical approach to radar implementation made it necessary to re-check its basic operation: could the radar perform surveillance and multiple target tracking ‘simultaneously’ (or at least with the functions interlaced at a rate which made the tasks appear simultaneous)? Could the radar automatically optimize its data rate to match target manoeuver? Could the radar still detect and track in areas of strong clutter and deliberate interference or jamming? All these trials fell under strong scrutiny of MOD and its various agencies since, amongst other things, the UK knew that MESAR 1 was probably the first true multifunction radar of its class in world technology.
With four such faces covering 360 degrees the antenna could be constructed to be entirely static, or if set to rotate as a conventional radar, the antenna could be configured with only two radiating/receiving faces. Linked to a powerful digital computer the MESAR planar phased array becomes active. The array minimises losses between the transmitter and the antenna and can therefore provide an equal performance with less than a quarter of the RF power used by a conventional transmitter design. Adaptive beam forming then becomes possible, with the array sub-divided into 16 sections providing simultaneously, accurate tracks at a high data rate on many potentially hostile targets, whilst maintaining a background surveillance on the surrounding air and sea environment. Adaptive pattern nulling could be employed in zones of ECM and a computer function would store prevailing target and clutter conditions thereby maximising weapon system performance throughout.
MESAR 1 PARAMETERS
- Frequency Band – 20% in S Band
- Scan Coverage - +/-45degree in azimuth and –35 to +37.5 elevation
- Module Power – 2Watts peak minimum
- Phase Shifter 4bit shared between Transmit and Receive
- Mean Duty Ratio – up to 25%
- Pulse Length – variable between 0.1µ.sec.and 1 milli- sec.
- Range discrimination – 30 metres
- Channel monopulse system for 3D Target position determination.
- Pulse Compression-Digital 256:1 (500:1 is planned)
- Target Velocity – up to 1000 m/sec
- Antenna Beam Width – 3.4 degrees Module nom. at broadside on receive – 3.1 degrees nom. at broadside on Tx.
- ECCM – Digitally adapted antenna pattern.
- Target position measurement – 2
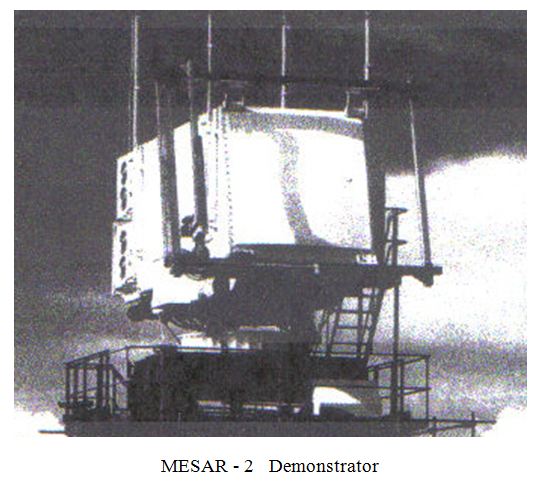
MESAR 2
For delivery in 1999 a programme was sponsored by U.K. MOD for the Company to produce a further MESAR Development Model that would demonstrate the technology’s performance against ballistic missiles, also enhanced detection (in clutter) of target aircraft and cruise missiles, with an ability to operate against low-level targets over sea and land.
10.12. ARTISAN
Following the report from ‘Euronaval 2006’ (Paris 23-27 October) BAE Systems/Insyte were contracted to build a team, that would include QinetiQ (the old ASWE/ARE) that would design, deliver and support the U.K. Royal Navy’s forthcoming Maritime MRR (Medium Range Radar) requirement. The result was the awarding of a design/development and production contract from which came the product ‘ARTISAN’.
The Radar Company, now BAE Systems/Insyte, were in 2008 awarded contracts to produce 19 equipments that were to replace the T996 Radar during the re-fitting of the RN’s fleet of Type 23 Frigates. ARTISAN is also to be fitted to the new LPD (Land Platform Dock) and LPH (Land Platform Helicopter) vessels. At the time of writing, ARTISAN will be fitted to the two new Queen Elizabeth Class aircraft carriers, currently under construction by BAE Systems and there is a working assumption that, as the new Future Surface Combatant (FSC) vessels come into the UK inventory, radars will be ‘cross decked’ from decommissioned Type 23’s.

ARTISAN is the result of a 24-month development programme based on a new product MESAR/SAMPSON and COMMANDER proven technology. It provides unrivalled performance in the detection of fast inshore attack craft and small airborne targets in clutter. It integrates with modern AAW Missile Systems, which will include Sea Wolf on the Type 23 Frigates and any new Future Layered Anti Air Warfare Defence System (FLAADS) for FSC vessels.
- It provides the track quality equal to ‘air traffic management’ products.
- In its secondary navigational role it makes a major contribution to tactical situation awareness.
- It maintains detection ranges at times of complex jamming attack.
‘ARTISAN’ FUNCTION AND PERFORMANCE DATA
- 3D Air Surveillance with fast targets alerts.
- Elevation accuracy –1.0 degree
- Secondary navigational surface-surveillance.
- 3D Tracking cap. (Air & Surface)-800 targets
- Surface gunfire support.
- Digital adaptive beam forming
- Weapon Systems Support.
- Fully automated detection/tracking.
- IFF interrogated support.
- Rotation rate 30RPM
- Maximum range – 200Km.
- Frequency Band E/F (S)
- Maximum elevation- coverage 70 degrees.
- Solid-state transmitter modules
- Minimum range 200 metres
- Frequency Agility
10.13. SAMPSON
SAMPSON is based on the highly successful multi-function electronically scanned radar and combines surveillance and dedicated tracking into one radar.
The SAMPSON development programme was initiated in 1999 by the radar company (now BAE Systems) in collaboration with the U K Defence Evaluation & Research Agency. It has been selected for the Royal Navy’s Type 45 Destroyers designed to operate throughout the 2nd and 3rd decades of the 21st Century.

At the top of the Destroyer’s superstructure is a radome that rotates together with the antenna it houses. A feature of that assembly is the pressurised ‘Dry Air’ flowing to cool the two array faces of the antenna.

Within the radome the two faced array rotates at 30rpm, facilitating rapid signal update.
Features of the SAMPSON Radar:
- Precision search and tracking of multiple targets, while interfacing with weapon control functions.
- Stealth Aircraft Target Detection.
- Variable data rate for threat tracking.
- High ECM immunity with high ratio pulse compression and frequency agility.
- Digital computer controlled beam forming suppressing multiple jamming.
- At S-band, high search rates in clutter are possible.
- SAMPSON sits at the heart of ‘point and area’ defence systems.
- SAMPSON adapts automatically to an environment of jamming and clutter.
- SAMPSON is compatible with active and semi-active missile systems to which it provides mid course guidance.
- Multiple parallel paths provide operation even if sub-systems fail.
- SAMPSON has NO high voltage, high power microwave parts thus enhancing maintainability.
- With the configuration of adjacent transmitter and antenna, negligible microwave losses result. Receive elements are combined in sub-arrays via strip line technology.
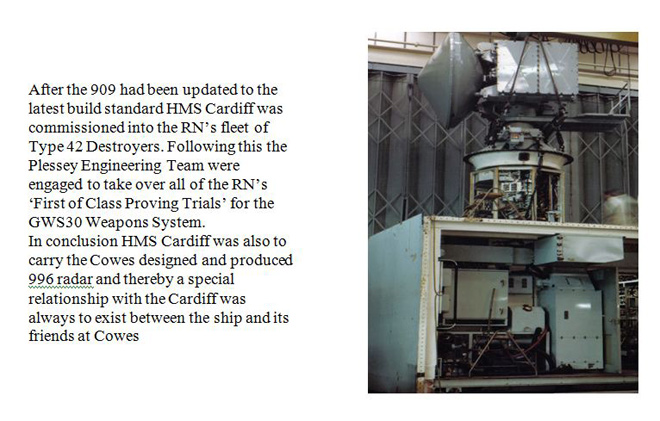
10.14. THE RADAR RT 909
1970 saw Plessey Radar awarded a contract to manufacture and test two radars of the Type RT 909. The 909 system had been designed by the GEC Marconi Company at Leicester, under contract to the MOD (N) as a key element of the RN GWS30 long range, ship based SEADART missile system. It was to be fitted to the Type 42 Destroyer Fleet along with three Aircraft Carriers. Each ship would have two 909 radar systems (one fore and one aft) to ensure all round space coverage.
MOD negotiated with Plessey Radar on the basis that a second channel of equipment supply for the 909 was vital to MOD, but in the event this was proved not to be the case. However, MOD invested in a freestanding building at the company’s Cowes site that increased their factory floor space by some 30%. (Today it meets the manufacturing demands of the SAMPSON radar). Beyond security protection, there were technical facilities installed relating to, for example, the clean oil processing plant and Faraday Cage for the assembly and testing of HV components.
Despite being provided with a full set of drawings and test specifications progress was never easy. The staff, at Plessey Radar, were strictly forbidden to make any direct contact with GEC staff at Leicester and all queries had to be relayed through MOD.
Although the Cowes produced 909’s were not the first in the overall production run, they were in fact the first to achieve customer systems acceptance and were dispatched to the Swann Hunter Shipyard on the Tyne to be installed on HMS Cardiff. The product was installed and set-to-work by a team of Cowes based Engineers. After successful ‘Harbour Trials’ the Plessey Radar team was expanded to include fitters and wiremen and contracted by MOD to implement some 2,500 modifications to each of the radars.